

本文首先简要介绍了危险品危险品处理机器人的作用,机械手的结构及形式,着重从控制管理系统与硬件设计介绍了危险品处理机器人机械手控制管理系统的设计与实现。最后给出了测得的机械手的各项技术指标。危险品处理机器人是用于危险弹药夹持、拔出、搬运和放置作业,并可携带和放置的装置。该项目的完成将解决长期困扰我军的事故炮弹、战争遗留弹等危险弹药安全处理问题。机械手是危险品处理机器人操作的流程中直接与弹药接触的重要部件,大多数都用在执行对危险弹药的夹持、拆除、搬运和放置作业, 机械手工作的稳定性直接决定着弹药处理的成功率,因此机械手的设计至关重要。
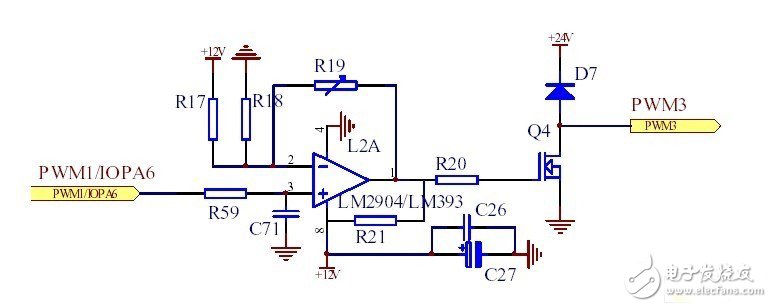
PWM 管脚:DSP 的每个事件管理器都有与比较单元相关的PWM 电路,能够产生六路带可编程死区和输出极性的PWM 输出,但是都是成对输出的,对于本控制器需要的独立的输出,每个事件管理器只有3 路,一个DSP 有两个事件管理器,可以独立的输出6 路PWM 波。液压控制器需要6 路PWM 波驱动电业比例阀,而伺服电机控制器需要4 路0-5V 的加速器信号调节电机转速,在设计电路时将这两种电路设计在一起,并制成印刷电路板,焊板时按每板的功能焊接即可,液压控制器需要输出PWM 波形,芯片用LM393 做比较器,此时电阻R19 和电容C71 不焊即可,但要有R21 上拉电阻,R17 和R18 将2 脚电压分在1.7V 左右较为贴切。伺服控制器需要输出0-5V 电压芯片用LM2904 做运放用,焊电阻R19 和电容C17不用MOS 管、R21 和外接电源,也不用焊R17,直接将DSP 输出0-3.3V 电压放大到0-5V 输出。PWM/电压输出电路图见图1:
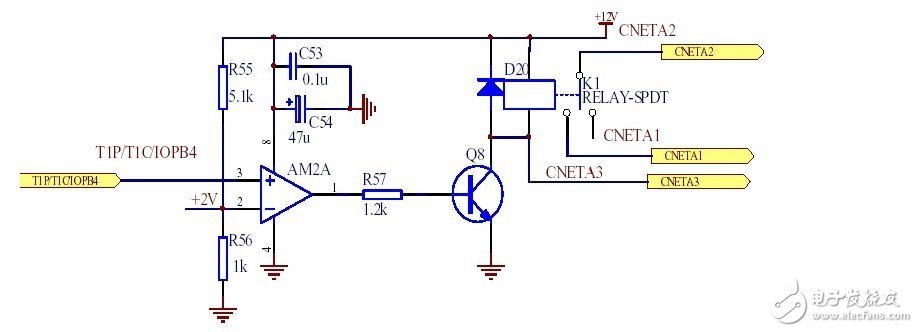
IO 口:DSP 的数字I/O 口模块具有控制专用I/O 和复用引脚的功能,可以输出输入高低电平信号,根据其功能将其设计成开关量输出,输入,并用其控制继电器,作为控的开关。开关量输入只要用电阻分压即可,开关量输出使用光耦隔离,本设计用的光耦PC817,更适合DSP 使用。当DSP 输出高电平时继电器吸合,CNETA1 和CNETA2 两脚导通继电器电路图见图2:
QEP 电路:DSP 的每个时间管理器都有一个正交编码器脉冲(QEP)电路。当QEP电路被使能时可以对CAP1/QEP1 和CAP2/QEP2(对于EVA 模块)引脚上的正交编码输入脉冲进行解码和计数。正交编码脉冲电路可用于连接光电编码器以获得旋转机械的位置和速率。伺服电机控制器需要用QEP 电路,由于一个伺服电机控制器需要控制4 台伺服电机,所以码盘信号使用74153 芯片选择输入,同时码盘的每路信号都有正负两根线 选择后输入DSP,码盘选择电路见图3:
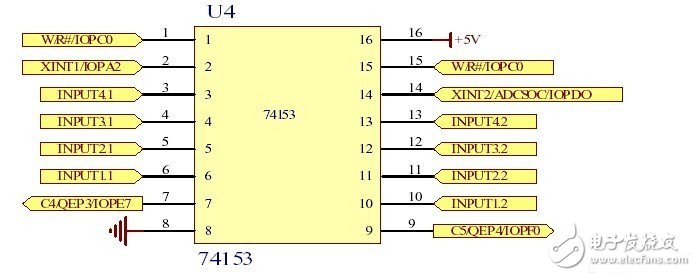
其中W/R/IOPC0 为使能信号,XINT1/IOPA2 和XINT2/ADCSOC/IOPDO 构成选择信号,74153 通过选择信号的选择码选择一对信号从7 脚和9 脚输出给DSP。其他硬件电路设计包括电源、串口、CAN 总线和DSP 外围接线等都是典型的设计。整个机器人车设计经过安装调试,机械手全部符合设计要求,达到如下技术指标:最大作业幅度约2.5m;最大作业深度:地下1m;最大作业幅度下夹持提升力80kg;最大夹持弹药直径160mm;目前国内还没有这种专业的处理危险品的机器人批量生产,本产品的成功完成为将来的批量生产奠定了坚实的基础,市场潜力巨大。
接力机器人机械部分采用遥控汽车,造型时尚,色彩华丽,车上装配的火炬有“2008奥运”标志,内部七彩电子火焰舞动闪烁,令人赏心悦目。比赛开始,人工启动第一辆机器人小车,车上火炬同时点亮,当遇到下一辆机器人小车时,下一辆机器人小车火炬自动点亮并启动前进。为了渲染效果,在终点,还设计了艳丽鲜花构成的凯旋门,当机器人小车胜利到达终点凯旋门时,电路自动触发燃放焰火,声光相伴,有着非常强的视觉冲击力
电路原理:一片电机驱动电路L293D、一个红外光电开关TCRT5000和一个电阻R2四样东西就构成了具有循迹功能的最简约的机器人。TCRT5000由一对相 “互隔开的红外发射和接收二极管构成,TCRT5000朝下安装在机器人小车底盘上。其中的发射二极管向地面发射红外线,接收二极管接收从地面反射的红外线。机器人使用了ATMAGE8单片机内部集成的模数转换功能,不一样的颜色的地面反射红外线的情况不同,因而接收二极管接收到的红外线信号强度也就不同,通过ATMAGE8单片机进行模数转换。
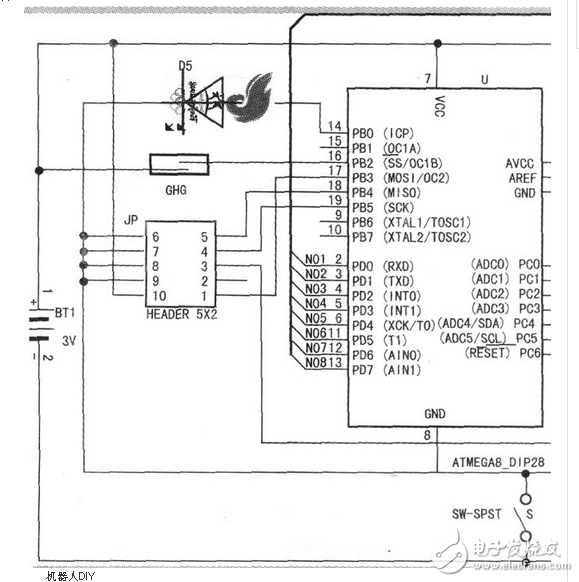
不同的红外线信号强度转换成不同的数值。据此就能识别地面的线迹,程序再通过电机驱动电路L293D控制车轮运动实现自动循迹。干簧管GHG是用来实现接力的,每辆车前端装磁铁,尾端装干簧管,后车靠近前车时,后车前端的磁铁作用于前车后端的干簧管,就传递了接力信号。红外发射二极管D3和红外接收二极管D4是用来配合机器人在完成接力后实现停车功能的。每辆车前端安装红外接收二极管D4,尾端安装红外发射二极管D3。当磁铁作用于干簧管,传递了接力信号后,前车通过后端的红外发射二极管D3发射红外线,后车通过前端的红外接收二极管D4接收到红外线后就停止前进。
更多机器人技术资料,电路图及DIY设计,可参见本期Designs of week当中国制造遇上机器人技术,设计思维请跟上!

首先循线机器人小车能够最终靠捕获红外传感器获取的信号来引导小车沿着地面上的线条前进。从红外传感器获取的信息经过信号放大,送入51单片机,单片机依据逻辑判断决定小车左右两侧电机的转速。单片机通过PWM技术来调控左右两侧直流减速电机的转速,当左右两侧转速相同时,小车进行直线行驶;当左侧电机转速大于右侧电机转速时,小车进行右转弯,反之小车进行左转弯。小车采用双电源供电,即控制部分采用5V直流电供电,而电机部分采用12V直流电供电。因为考虑到电机功率不是很大,因此没有采用光电隔离处理。
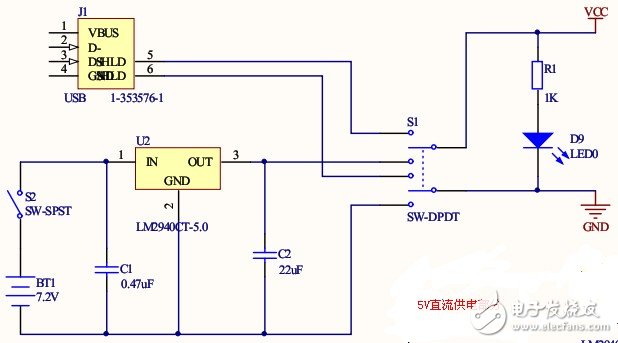
在设计中我原规划使小车即能够最终靠USB供电,又能够最终靠充电电池组供电,具体选择哪种供电方式通过S1开关进行切换。由于USB供电电源是标准的5V 直流电源,因此就省去了稳压电路。而在通过电池组供电的电路中,当S2开关闭合时,电池组提供的电压经过U2的稳压再介入系统当中。U2我才有的是 LM2940CT-5.0,它可以将输出电压稳定在5V输出,输出电流最大能够达到1.25A。在电路中加入D9的发光二极管用于指示是否通电,在D9前串入一个1K欧的电阻R1用于限流。
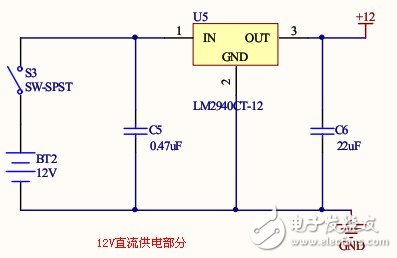
这部分电路设计同5V电源部分,只是U5部分换成了LM2940CT-12的芯片,此芯片输出电压为12V。
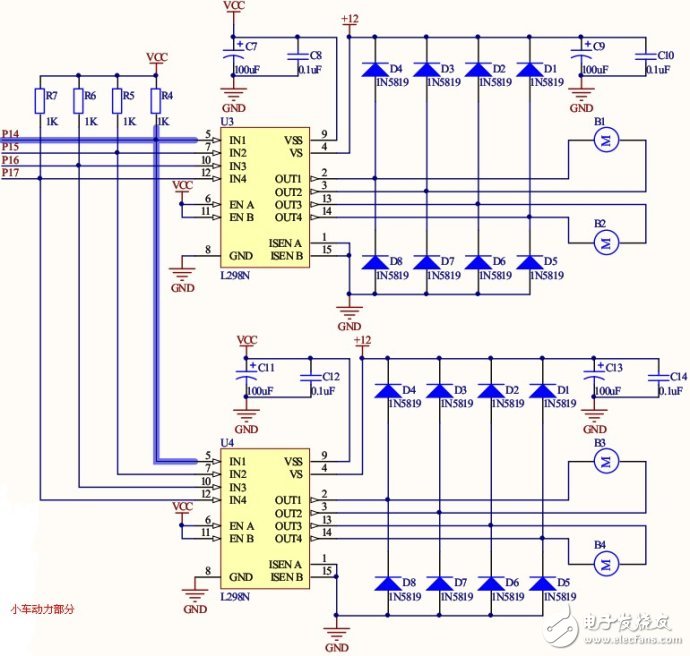
小车采用4轮驱动,左右各2个12V直流减速电机,通过L298N来进行驱动。L298N的输入分别接STC89C52RC单片机的P1.4、 P1.5、 P1.6、P1.7口。当P1.4、P1.5同时为高电平或者低电平时电机B1、B3停转,即小车左侧车轮停转;当P1.4输出高电平,P1.5输出低电平时,B1、B3正转;当P1.4输出低电平,P1.5输出高电平时,B1、B3反转;当P1.6、P1.7同时为高电平或者低电平时电机B2、B4停转,即小车右侧车轮停转;当P1.6输出高电平,P1.7输出低电平时,B2、B4正转;当P1.6输出低电平,P1.7输出高电平时,B2、B4反转;各电机转速的控制通过PWM技术实现。
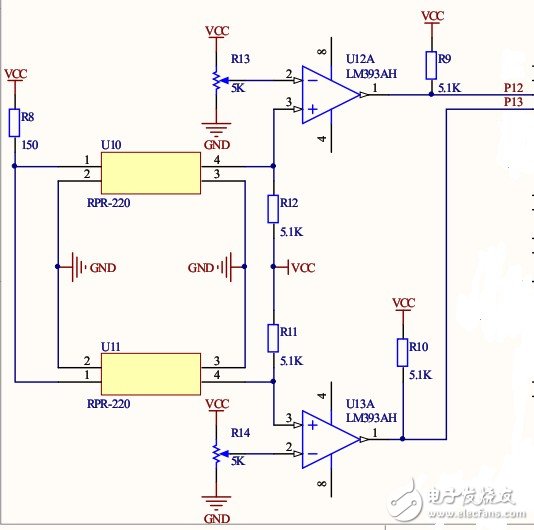
小车采用红外发射对管RPR-220来探测地面线进行放大,然后送入单片机STC89C52RC的P1.2和P1.3口。原理图中R13、R14是用于调谐红外发射对管采集信号的灵敏度的。
循线机器人小车最简单,不比双足机器人有众多活动部件的控制和设计,循线小车活动部件就只是驱动小车的车轮,控制左右车轮的转速来控制小车前进方向是直行,还是左转弯,或者右转弯,因此能看出整个控制系统简单。通过简单的循线机器人小车的设计,掌握对电机驱动、传感器信号采集、电源供应、焊接技术、设备采购、系统总体规划等部分有个感性的认识,因为这些部分是将来所有机器人设计中不可回避的基本部分。
为实现机器人高速精确地按照规定路径行走,要求机器人的CPU能够实时迅速地读取多个传感器端口数值,并在较短的时间内完成对各端口数值的存储、运算和输出等多种任务。由于嵌入式微处理器对实时任务具有很强的支持能力,能够完成多任务并且具有较短的中断响应,因此在设计过程中选用以嵌入式微处理器ARM9为核心的控制器,其内部采用哈佛结构,每秒可执行一亿一千万条机器指令。本设计还设置了 4路PWM控制信号输出端口,用以驱动4路大功率直流电机,实现对转速的精确调节;此外,还设置了7路Do数字输出端口,用以驱动伺服电机、蜂鸣器、继电器、发光二极管等。为了给庞大和复杂的程序提供更多的执行空间,本设计附加设置了100 KB的数据存储器(RAM)和512 KB的程序存储器(Flash ROM),用以存储更多的数据和命令。
电源是保证机器人稳定、可靠运行的关键部件,它直接影响着机器人性能的好坏。由于本机器人电机驱动和控制器采用两种不同等级电压的电源,为避免2个电源相互干扰,本机器人采用双电源供电系统:电机电源采用高放电倍率聚合物锂电池,容量为2 500 MAH,工作电压为24 V,能提供40 A的稳定供电电流,是普通电池的10倍;控制器电源采用8.4 V锂电池,并提供电压采样端口,以供电池检测,电路图如图2所示。
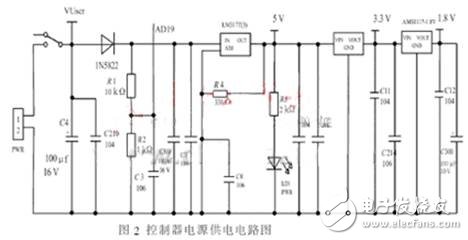
为获得CPU各端口电路所需要的不同等级的电压,本设计采用 1个LM317T三端稳压器和2个AMS1117低压差线性电压调整器,并通过其附属电路,得到精确稳定的5 V、3.3 V、1.8 V 三种电压;采用1个发光二极管LD1和限流电阻R5作为电源指示灯,以显示电源开关的状态;为实时采样电源电压,防止锂电池过放或过充,设计中通过R1、 R2分压,引出AD19端口作为电源采样端口。
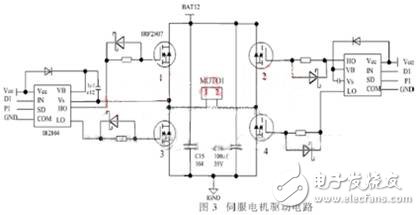
由于电机功率较大,并要求能实现双向、可调速运行,本文设计了半桥式电力MOSFET管,成功实现了对电机的控制。如图3所示,2路PWM信号通过 IR2104半桥驱动器(half-bridge driver)和相应保护电路连接至型号为IRF2807 的MOSFET管,控制电源与电动机连接线路的通与断,达到控制电机速度的目的。当PWM信号占空比较大时,线路导通时间长,电机速度大;相反,当PWM 占空比较小时,线路导通时间短,电机速度小。4个MOSFET管在不同时刻导通组合,实现控制电机转动方向:当MSFET管1和4导通时,电机端口1为正、2为负,电机正转;当MOSFET管2和3导通时,电机端口2为正、1为负,电机反转。
为能完成灭火任务,机器人必须能确定火焰的大致位置,并能对火焰是否被扑灭做出判断。本文设计了由28个红外接收管组成的2个远红外火焰传感器组,前后每个方位各有14个红外接收管组成,每2个并联并指相同一个方向,2个传感器组共指向14个方向,可以覆盖360范围。如图所示,14个端口通过 CD4051八路转换开关连接至ATMEGA816PC单片机,其中 SCK、MISO、MOSI为位选择端口。此外,本设计还可以通过对14路读取数据进行比较,从而确定其最大最小值及相应端口值,方便火源方位的确定。
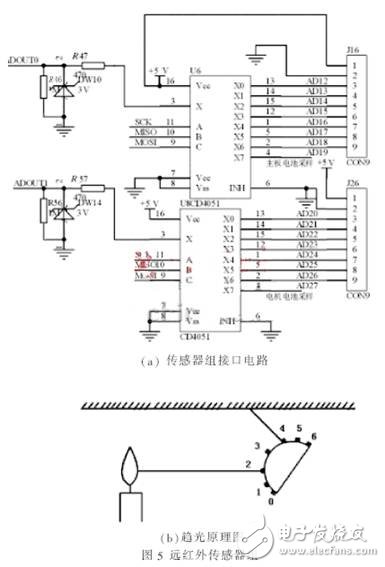
通过对远红外传感器组的不同端口值的比较,还可以确定机器人和火源的相对位置,以判断前进方向,完成趋光动作。当机器人与火源相对位置如图5(b)所示时,可以读取端口2和端口4的值,并进行作差,端口2的值大于端口4(说明2更靠近火源),则执行左拐命令,使其差值在一定范围内,然后执行直行命令趋近火源。
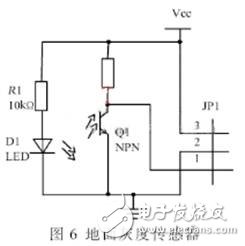
如图所示,地面灰度传感器通过发光二极管LED照亮地面,地面的反射光线被光敏三极管接收,当地面颜色为黑色时,反射的光线比较弱,则光敏三极管的基极电流越小,集电极电流也相应较小,1端口电压值较高,其测量值较大;反之当地面为白色时,反射的光线较强,集电极电流越大,1端口电压值较小,测量值也较小。
本文研究并设计了基于ARM9嵌入式系统的一种智能灭火机器人,具有以下5个创新点:(1)采用了嵌入式系统内核,大大提高了机器人处理信号的能力;(2) 双电源供电系统引入,使机器人的运行更加稳定可靠;(3) 采用PWM信号控制大功率直流电机,在速度和精度方面有了很大的改进;(4)通过合理选择PSD测距传感器的个数和安放位置,既满足比赛要求,又能节约成本;(5)本文设计的远红外火焰传感器组,很好地完成了对火源的精确定位任务,提高了灭火可靠性和快速性。实测证明,本文设计的机器人能够很好地完成比赛任务,并且在可靠性和速度方面都有了大幅度的提高,具有很强的应用价值。
这种探测器的依据是超声波具有很强的方向性。发送的传感器发出连续信号。在这个装置之前约几米的适当物体可以把相当强的信号反射回到接收传感器。发送和接收传感器只相隔大约50毫米,所以方向性强的超声波保证从发射器到接收器之间的直接耦合波显得微不足道。这个电路从RCX装置获得电源,它就和一种标准Lego探测器一样连接到RCX装置的一个输入端口。并没有特别支持采用RCX代码或者 Mindstorms套件通常共用的其他编程语言的超声波探测器。因此,可以利用软件以标准有源探测器。例如Lego光探测器的相同基本方式操纵它。
图中是超声波探测器的整个电路图。二极管列阵由D1至D6组成,而标准的桥式整流器则由D1至D4组成。这个整流器连同滤波电容C3产生7伏特电源。桥式整流器提供全波整流,所以电路怎样连接RCX装置都没有关系。

RCX装置内部的上拉电阻通常使输入端子处于高电位。D5和D6使IC1a的输出把RCX端口输入端拉低至0伏电压。这个装置怎样连接RCX装置也是没有关系的。IC1a的输出通过两个二极管的任何一个连接端口的带电输入端。在输入提供电源的时间内,两个二极管的其中一个就会阻断电源,因此只有极小电流流过两个二极管。在这些时间内,lC1a的输出连接电源,但R1却阻止过量的输出电流流入IC1a的输出级。
IC1a是缓冲放大器,它是普通的电压跟随级。IC1b是直流放大器。它以同相模式操作,反馈电阻R2和R3把它的闭环电压增益调整倒3.7。要注意,lC1采用的LM358N是用在没有负电源的直流电路的。其他大多数运算放大器并不能提供这里要求的很低输出电压,所以不建议使用代用器件。TR1放大接收传感器Mic1的输出。 TR1用简单的共射极放大器,它提供超过40dB的电压增益。C2将其输出耦合到D7和D8组成的半波整流器电路。C1和 R4组成平滑滤波电路。发射器电路只是采用标准震荡配置的555时基电路(IC2)。RCX装置可以从每个输入端提供的最大电源电流是相当有限的,所以 IC2最好采用低电源的 555。否则就会出现负载太大的风险以致获得不合适的电源电压。VR1是频率控制器,通常调节它而使电路产生最佳性能。不过,如果需要降低灵敏度,可以故意使它偏离最佳频率。
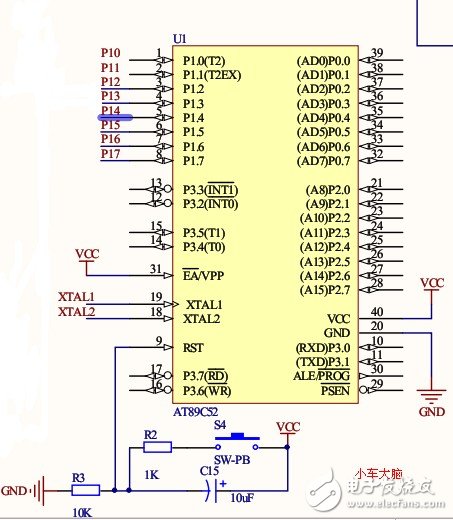
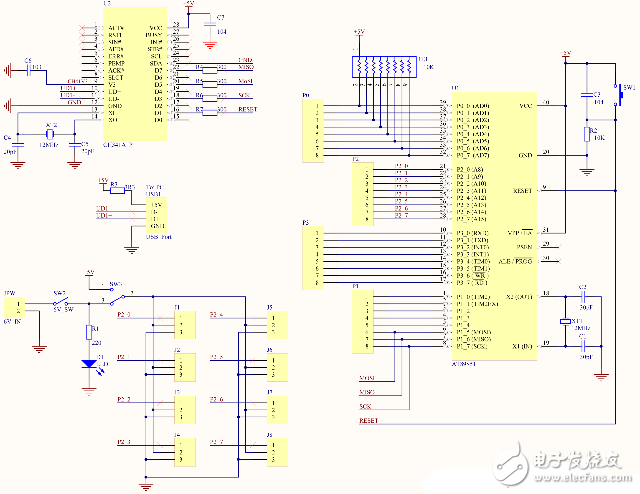
AT89S51 的编程方式可分为并行及串行模式。由于目前PC台式及及笔记本已经逐渐取消并口,因此并口编程器已经逐渐被淘汰。采用USB接口的ISP编程器比较适合实验之用。本书所附赠的电路就是以USB ISP串行模式来对AT89S51进行编程的,其电路如图所示。图为AT89S51 USB ISP编程器电路图:
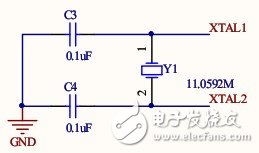
CH341A是一个USB总线转接芯片,通过USB总线提供异步串口、打印口、并口,以及常用的2线无铅封装,具体功能由复位后的功能配置决定,同一引脚在不同功能下的定义可能不同。CH341芯片正常工作时需要外部向XI引脚提供 12MHz的时钟信号。一般情况下,时钟信号由CH341内置的反相器通过晶体稳频振荡产生,外围电路只需在XI和XO引脚之间连接一个12MHz晶体,并为XI和XO引脚对地连接振荡电容。CH341芯片支持5V电源电压或者3.3V电源电压。当使用5V工作电压时,CH341芯片的VCC引脚输入外部 5V电源,第9脚(V3引脚)应该外接容量为4700pF或者0.01uF的电源退耦电容。CH341 第10、11脚连接到USB数据总线MHz晶体,为芯片提供时钟。第16、18、20、22脚分别接300的限流电阻,作为 RST、SCK、MOSI、MISO信号输入/输出。在使用CH341A的USB转ISP功能时,第23脚必须接地。第28为电源5V输入,接退耦电容,可使让芯片工作更稳定。
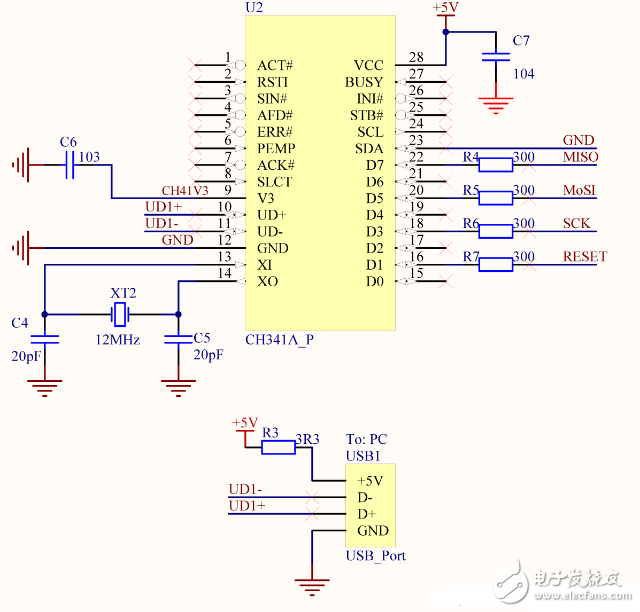
在图3.12里,USB1为与电脑连接的USB插座。此USB插座共有4个脚,分别为+5V、D-、D+及GND。+5V及GND是本电路板的电源来源。R3为限流电阻,此电阻的取值需要根据实际情况确定。在使用此电阻时,应保证后端的CH341A及AT89S51芯片供电电压大于4.5V。在保证接入的元件接线正确及电路整体消耗电流小于500mA的情况下,此电阻可以不接,直接用短线A芯片通过USB接口和USB连接线完成与电脑的数据传输。
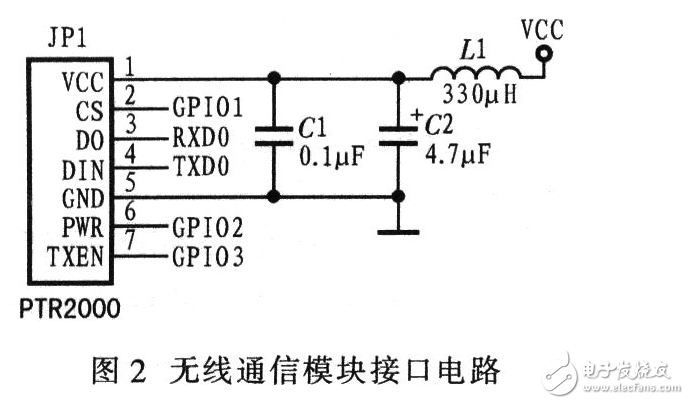
系统采用迅通公司生产的PTR2000无线通信数据收发模块。电路接口如图2所示。该模块基于NORDIC公司生产的射频器件nRF401开发,其特点是:①有两个频道可供选择,工作速率高达20 Kb/s;②接收发射合一,适合双工和单工通信,因而通信方式比较灵活;③体积小,所需外围元件少,接口电路简单,因此特别适合机器人小型化要求;④可直接接单片机串口模块,控制简单;⑤抗干扰能力强;⑥功耗小,通信稳定。

两路超声波传感器用以控制机器人避开障碍物,并预测机器人相对目的地距离,起导航作用,其接收部分与微控制器的捕获和定时管脚相连接。整个超声波检测系统由超声波发射、超声波接收和单片机控制等部分组成。发射部分由高频振荡器、功率放大器及超声波换能器组成。经功率放大器放大后,通过超声波换能器发射超声波。
图5给出由数字集成电路构成的超声波振荡电路,振荡器产生的高频电压信号通过电容C2隔除掉了信号中的直流量并给超声波换能器 MA40S2S。其工作过程:U1A和UlB产生与超声波频率相对应的高频电压信号,该信号通过反向器U1C变为标准方波信号,再经功率放大,C2隔除直流信号后加在超声波换能器MA40S2S进行超声波发射。如果超声波换能器长时间加直流电压,会使其特性明显变差,因此一般对交流电压进行隔除直流处理。 U2A为 74ALS00与非门,control_port(控制端口)引脚为控制口,当control_port为高电平时,超声波换能器发射超声波信号。
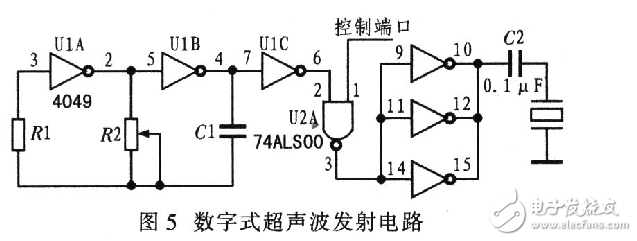
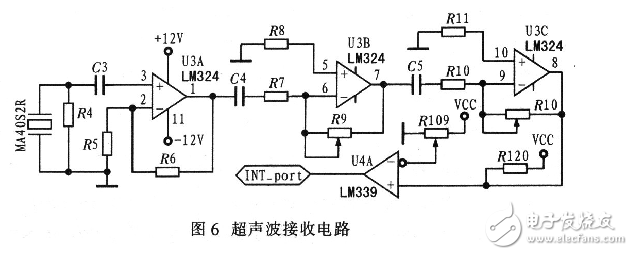
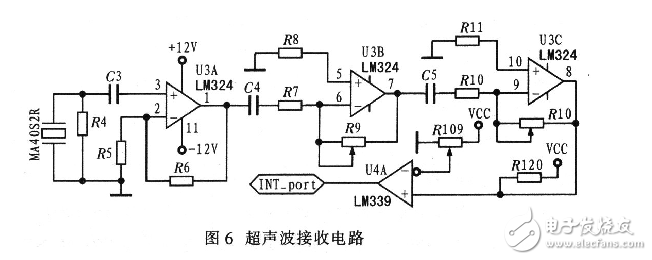
图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电压比较器LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相连,当接收到中断信号后,单片机立即进入中断并对超声波信号进行处理和判断。
根据竞技机器人的功能要求进行总体设计,将各个功能进行模块化,其控制管理系统硬件框图如图所示。中央处理器采用微控制器结构,用以控制外围设备协调运行。舵机控制机器人的运动方向;驱动电机电动机采用输出轴配有光电编码器的小型直流电机驱动车轮旋转。电磁铁作为机械手夹紧的执行元件。设置了两路超声波传感器、8路光电检测输入和8路开关量检测接口。
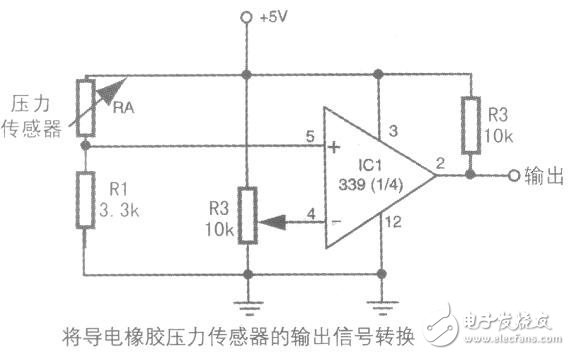
下图中给出使用导电橡胶片的比较合理的接口电路。导电橡胶片和一个3.3k电阻串联在地与电源正电压之间形成了分压器。当导电橡胶片受压时,传感器的输出端的电压就会变化。传感器的输出端就是压电片和电阻之间的一点,此信号连接到比较器339的反向输入端引脚上。当压电片的电压超过了比较器的参考电压时,比较器输出状态改变,就表示碰撞发生了。这个比较器的输出可以用来驱动一个控制马达方向的继电器上或者直接连接到一个微处理器或计算机端口上。
当有许多开关或者近距离探测设备布置在机器人的周围时会怎样呢?不得不把每个开关的输出连接到电脑里,但是那样做浪费了很多外设端口。一个比较好的解决办法是利用一个优先编码器或者多路转换器。这两个方案允许在一条公共控制线路上连接多个开关。机器人的微处理器或计算机将查询这条控制线,而不是每个开关或近距离探测设备。
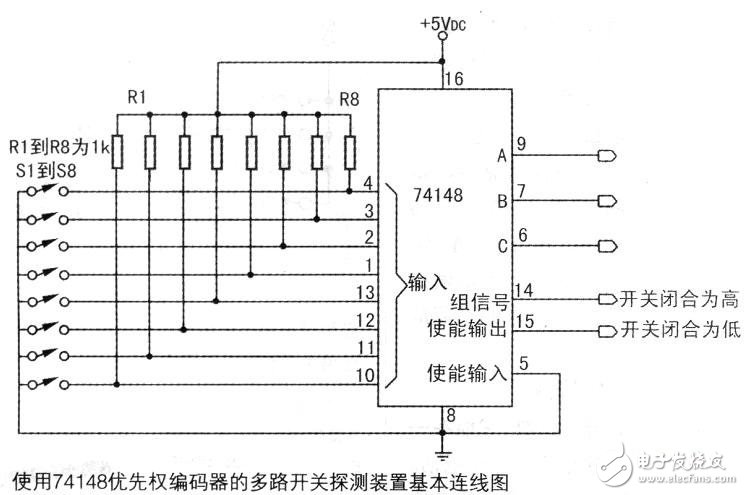
集成块的输入端就是那些开关的输出。当一个开关闭合,相应的二进制编码就会出现在A-B-C输出引脚处。对于优先编码器,只有开关中最高的值才能在输出端显示出来。换句线都闭合了,那么输出端只能反应引脚4闭合。
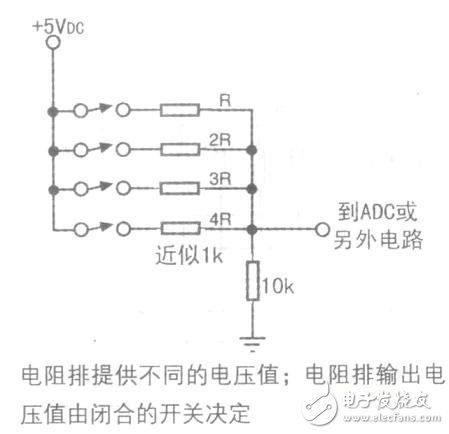
如果机器人的计算机或者微控制器中有模一数转换器(ADC)或者可以添加一个,就能以另一种技术实现多路开关接口:电阻分压排。概念十分简单,像图18 所示。每个开关通过一个电阻的一端接地,而+V电压串接另一电阻到各开关上。多个开关则并行接入ADC的输入端,如图所示。这些电阻形成了一个分压器。由于每个电阻值都不同,所以当某一开关闭合时,对应的电压值都是独一无二的。注意,由于电阻是并联的,所以一次可能有多个开关闭合。从而得到一个中间值。要对连接每个开关的电阻值进行摸索实验以获得最大的灵活性。
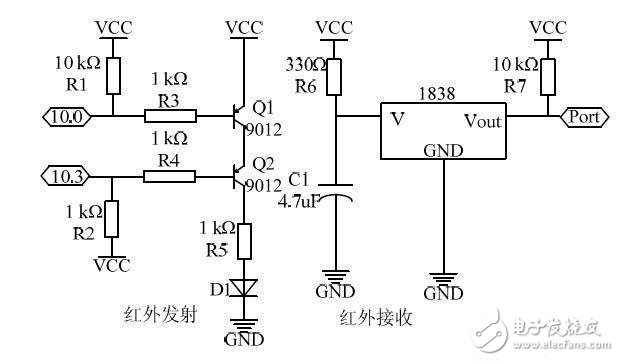
系统的智能跟随功能是通过红外实现的,音乐机器人上的红外接收器感知到红外线时,会追踪红外发射源,感知不到时,会原地旋转重新搜索红外发射源,直至 重新 定位方向。红外发射源是由10 个红外发射管组成,将10 个红外发射管均匀摆放在一个球体表面,使得红外发射源可以向四面八方辐射红外线,保证音乐机器人更加快速准确地寻找到红外发射源。红外发射管发射的载波频 率为38 kHz 占空比为50%的方波。红外的发射和接收电路如图4所示,10.0 连接一个普通I/O 引脚,控制红外线 ms,反复进行接通与关断。 连接一路PWM 方波,方波的频率是38 kHz.一共有10 路红外发射管。
红外接收装置采用2 个红外接收器1838,分别安装在音乐机器人的头部和尾部。两个接收器的输出引脚分别连接单片机的10.2 和10.7 引脚。红外接收器1838 对38 kHz 频率的红外线 可以检测到红外发射源的方位,从而驱动电机向外发射源的方向前进。
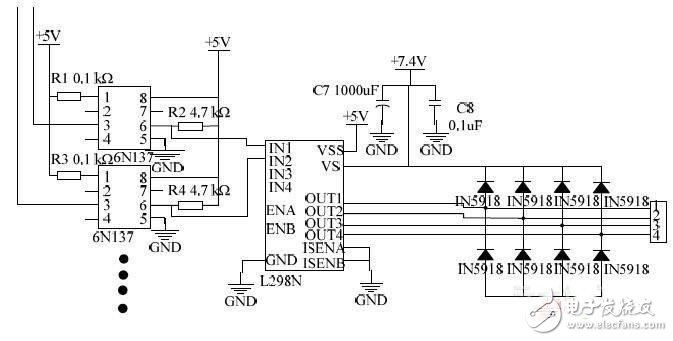
电路利用麦克风采集声音信号,然后利用LM324 对采集来的信号进行比例放大,放大的比例为100 倍,然后接过两个1N5819 和一个104 独石电容进行包络线 作为电压比较器,利用1 K 电阻和880电阻分压获得比较电压值,其电路如图5 所示。机器人的移动采用驱动直流电机带动轮子转动实现,即控制直流电机的正反转和速度,系统直流电机驱动芯片采用SGS 公司的L298N,内部有4 通道逻辑驱动电路。用三极管组成H 型平衡桥,驱动功率大,驱动能力强。同时H 型PWM 电路工作在晶体管的饱和状态与截止状态,具有非常高的效率。

电机的转速取决于3 个因素:负载、电压和电流。对于一个给定的负载,能够最终靠脉冲宽度调制的方法来使电机保持稳定的速度。通过改变施加在直流电机上的脉冲宽度,可以增加或减小电机的转速。调整脉冲宽度,即改变占空比,调整电机的速度。驱动板采用6 个高速光耦6N137 实现驱动电路与逻辑电路的隔离,这样可以有效地避免驱动电路与逻辑电路之间的相互干扰。驱动板的电路原理图如图6 所示。
通过软件编程可以自由改变单片机两路PWM脉冲信号的占空比,电机的A 端连接PWM 脉冲信号,电机的B 端连接单片机的一个I/O 引脚。当这个I/O 引脚置1 时,电流从电机的B 端流向电机的A 端;当这个I/O 引脚置0 时,电流从电机的A 端流向电机的B 端,这样电机就可以改变电机旋转方向,同时控制PWM 脉冲信号的占空比值还可以改变电机旋转速度,实现转向和转速的控制。
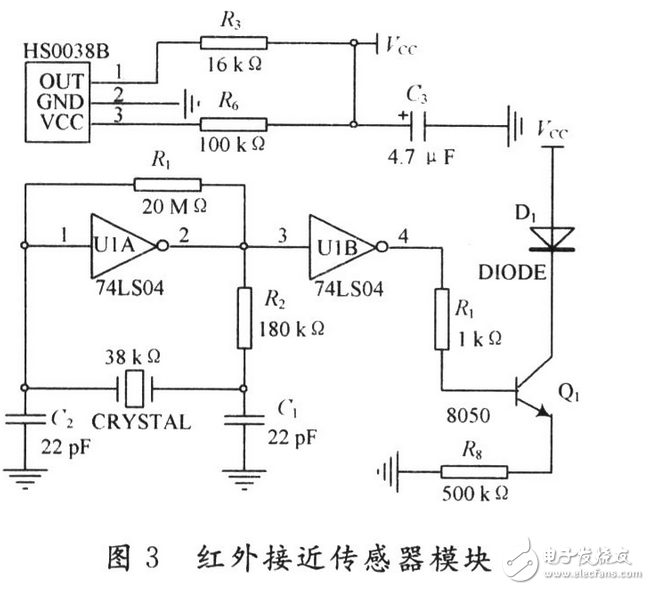
反射式光电开关是由红外LED光源和光敏二极管或光敏晶体管等光敏元件组成,当有障碍物阻拦时光线能够反射回来,输出为低电平信号;当没有障碍物阻拦时,光线不能反射回来,输出为高电平信号。吸尘机器人的近距离红外接近传感器由两组相同的红外发射、接收电路组成。每一组电路可分为高频脉冲信号产生、红外发射调节与控制、红外发射驱动、红外接收等几个部分。通过38kHz晶振和非门电路得到一个38kHz的调制脉冲信号;利用三极管驱动红外发射管(TSAL6200)的发射。发射管发出的红外光经物体反射后被红外接收模块接收。通过接收头(HS0038B)内部自带的集成电路处理后返回一个数字信号,输入到微控制器的I/O口,如图3所示。接收头如果接收到38kHz的红外脉冲就会返回输出低电平,否则就会输出高电平。通过对I/0口的检测,便可以判断物体的有无。
在小功率系统中,直流电机线性特性良好,控制性能优越,适合于点位和速度控制。为了实现直流电机的正反转运行,只需要改变电机电源电压的极性。电压极性的变化和运行时间的长短可以由处理器实现,而提供直流电机正常运行的电流则需要驱动电路。
H桥式驱动电路是比较常用的驱动电路。该设计两个行走驱动电机采用分立器件功率场效应管和续流二极管搭建,成本低,便于散热,如图所示。
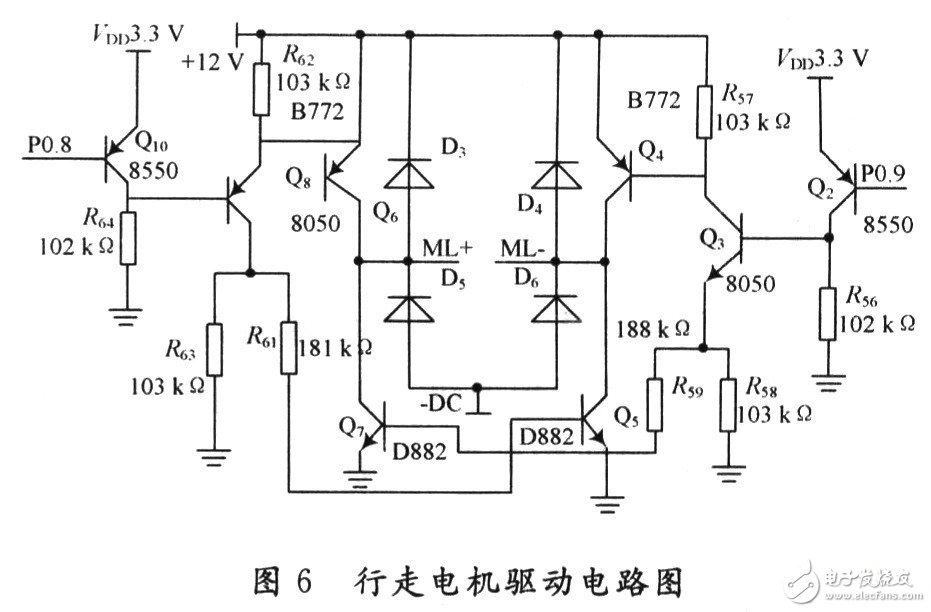
用ARM7的P0.8和P0.9来控制电机,这两个管脚都是PWM输出管脚,可以控制电机的速度。该部分主要保证机器人能够在平面内移动,同时轮上带有编码器,可以对行走的路程进行检测。通过航位推算可以实现机器人的转弯,假设机器人光电码盘的分度数为N;控制器收到的脉冲数为m;轮子的直径为D;两个轮子之间的间距为W,则轮子前进的距离即可算得。
清洁机器人作为服务机器人的一种,有着巨大的市场潜力和广阔的应用前景。随着传感技术的发展和微处理器的不断进步,价格也在不断下降。在此研究和设计一个基于ARM7微处理器的清洁机器人控制系统,不仅满足了实用性的要求,而且在不增加成本的基础上为软件提供了良好的硬件支持,为更好的算法和软件升级提供良好的技术支持。若读者对机器人技术感兴趣,不妨多探讨一下未来发展趋势以及最新革新技术走势等等。
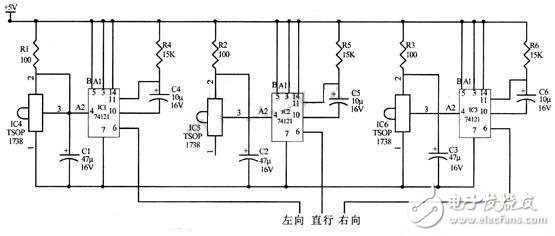
红外线传感器电路下见图。在机器人左、中、右三个方向放置传感器以检测红外线发射源的位置,当某个传感器接收到红外线的6脚输出一个保持时间大约为100ms的高电平,单片机以此高电平信号作为修正方向的依据。
微处理器和电机驱动电路见下图。单片机的P3.1、P3.2和P3.2分别与左、中、右三个方向传感器的输出相连,三个传感器输出共有8种组合,单片机根据不同的组合状态修正机器人的前进方向,其修正方向和传感器输出组合的关系见方向修正真值下表。
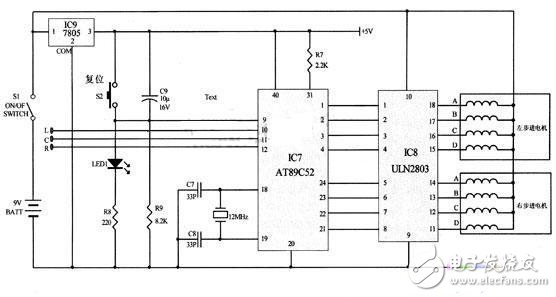
从真值表中可以清楚的看到当三个传感器输出都为0时,也就是线”状态时单片机控制机器人顺时针方向旋转以寻找红外线”状态时单片机控制机器人向右前进;当输入为“110”状态时单片机控制机器人向左前进;当输入为“111”状态时单片机控制机器人向正前方前进;当输入为“101”状态时,代表机器人正前方的传感器被障碍物阻挡,单片机控制机器人向左方向旋转以避开障碍物,也意味着当有障碍物阻挡机器人前进时机器人可以自动绕开障碍物并重新寻找红外线发射源。
随着人工成本的不断升高,用机器人代替人力去做一些重复性的高强度的劳动是现代机器人研究的一个重要方向。搬运机器人在导航寻迹中,需要后轮驱动电机和前轮舵机的协调工作。搬运机器人电机驱动有其特殊的应用要求,对电机的动态性能要求较高,能在任意时刻到达控制需要的指定位置并且使舵机停止在任意角度;电机驱动的转矩变化范围大,既有空载平整路面行使的高速度、低转矩工作环境,也有满负载爬坡的运行工况,同时还要求保持较高的运行效率。根据以上的技术要求,本文选用了控制技术成熟,易于平滑调速的直流电机作为搬运机器人的执行饥构。
电机的供电电源是由24V的蓄电池提供,额定功率为240W,由4个75N75组成桥式电路来实现。75N75是MOSFET功率管,其最高耐压75V,最高耐流75A,电机驱动电路如图2所示。
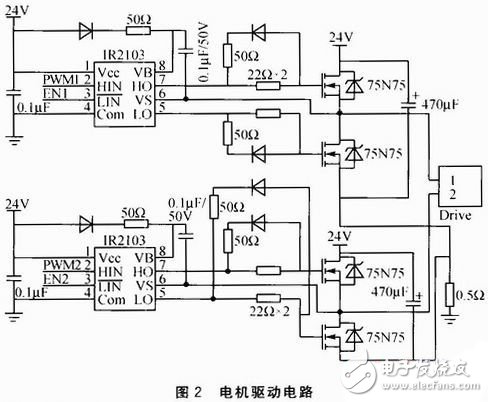
Q1、Q4和Q2、Q3分别组成两个桥路,分别控制电机的正转和反转。高端驱动的MOS管导通时源极电压和漏极电压相同且都等于供电电乐VCC,所以要实现MOS管正常的驱动,栅极电压要比VCC大,这就需要专门的升压芯片IR2103。控制器产生的PWM信号输入HIN引脚,控制器I/O口输出的 EN1、EN2作为使能信号。输出端HO就可得到比VCC要高的电压,且高出的电压值正好是充在电容两端的电压。二极管提高导通速度,使得75N75的导通电阻更小,降低了开关管的损失。同时IR2103的两个输出口HO、LO具有互锁功能,防止由于软件或硬件错误造成的电机上下桥臂直通造成短路。
在电机控制系统中安装过流保护有两方面的意义:一是防止在电机正常运行时,电机出现超载或堵转而使得电枢绕组电流过大损害电机甚至引发火灾;另一方面是由于电机肩动时启动电流很大,往往不能直接启动,既需要等励磁绕组逐渐建立磁场后再正常运行,又希望电机以尽量快的速度肩动起来。有了过流保护对电流进行斩波,可以使电机安全快速地启动。过流保护原理图如图3所示。
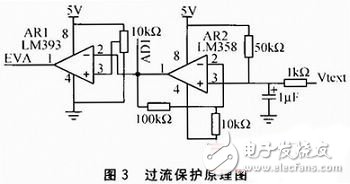
电机的相电流通过康铜丝转换成电压信号Vtext,经过运算放大器放大后的模拟量AD1送至控制器A/D转换模块,同时将经过电压比较器比较后的数字量 EVA送至控制器的外部中断口。针对搬运机器人的前轮转向舵机和后轮驱动电机的控制要求,采用以Cortex-M3为内核的STM32F107作为主控制器,采用嵌入实时操作系统C/OS-II,将程序分成启动任务、电机转速控制任务、舵机控制任务等相对独立的多个任务,并设定了各任务的优先级。该系统能较好地实现搬运机器人的运动控制。
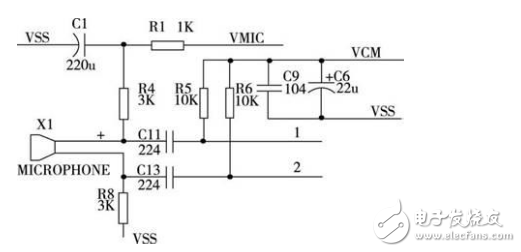
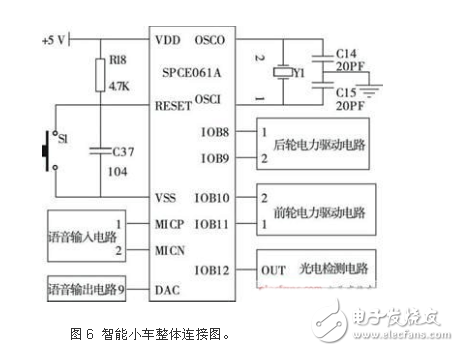
小车的语音输入电路如图所示。其中,VM IC 提供传声器的电源,VSS是系统的模拟地,VCM 为参考电压,1脚和2脚分别是传声器X1 的正极、负极的输入引脚。当对着传声器讲线 脚将随着传声器输入的声音产生变化的波形,并在SPCE061A 的两个端口处形成两路反相的波形,送到SPCE061A 控制器内部的运算放大器进行音频放大,经过放大的音频信号,通过ADC转化器转化为数字量,保存到相应的寄存器中,然后对这些数字音频信号进行压缩、辨识、播放等处理。
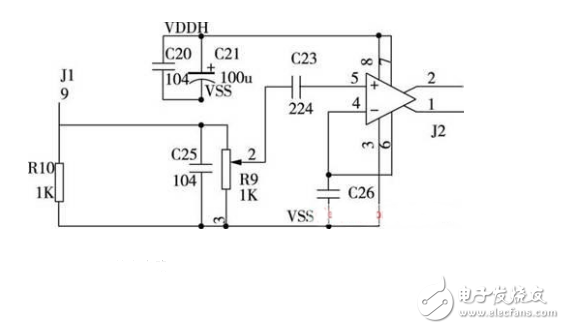
小车的语音输入电路如图所示。其中,VDDH 为参考电压,VSS是系统的模拟地。音频信号由SPCE061A 的DAC引脚输出送到电路的9端,通过音量电位器R9的调节端送到集成音频功率放大器SPY0030, 经音频放大后,音频信号从SPY0030输出经J2端口外接扬声器播放声音。
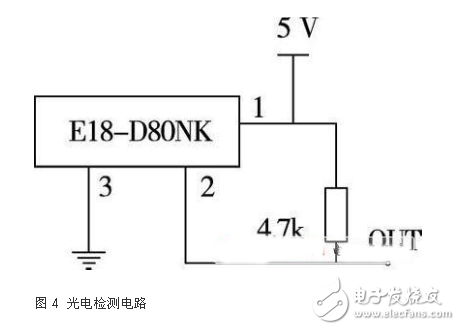
小车的光电检测电路采用E18-D80NK型号的光电传感器,它集发射和接受于一体,红外发射管向某一方向发射红外线,遇到障碍物后红外线被反射由接收管接受,从而判断出小车的前方是否有障碍物,对障碍物的感应距离可以根据要求通过传感器上的微调旋钮进行调节。传感器前端增加了透镜,利用聚焦作用远距离探测物体。传感器内部集成了放大、比较、调制电路,使传感器受可见光的影响较小,光电检测电路的连接图如图4所示。
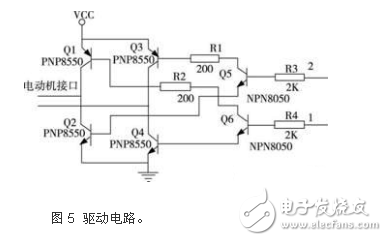
小车的驱动电路是一个全桥驱动电路( 图5),Q1,Q2, Q3, Q4四个三极管组成4个桥臂,Q5 控制Q2和Q3的导通和关断,Q6控制Q1 和Q4 的导通和关断,驱动电路分别用于后轮动力驱动电路和前轮方向驱动电路。当1管脚为高电平,2管脚为低电平时时Q1 和Q4 导通,Q2和Q3截止,电动机带动车轮运转; 当1管脚为低电平,2管脚为高电平时时Q1和Q4截止,Q2和Q3导通,电动机带动车轮反向运转。
智能小车的正确识别率在90% 以上,实验过程中发现,影响小车正常辨识的因素主要包括周围环境的噪声、人与小车的距离等,这些需要在今后改进。这种语音控制的智能小车机器人将来不仅可以为人服务,稍加扩展,还可以在多种不适合人作业的场合替代人执行任务。因此这种语音控制小车机器人具有重要的学术研究价值。
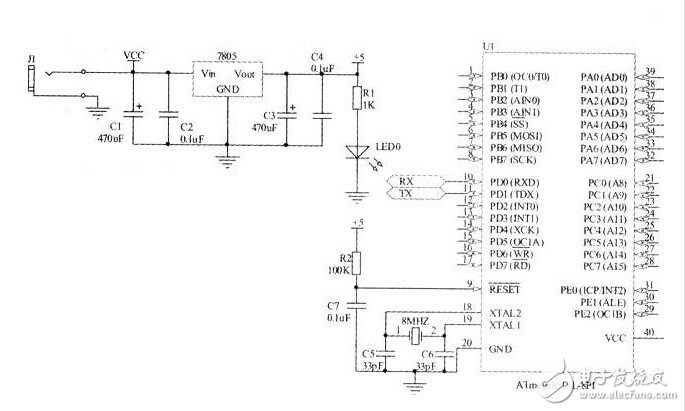
用AVRmega8515作一个带PC机串口通讯的最小单片机机器人控制系统,电路图见下图。使用时用WINDOWS自带的超级终端,把速率调整到9600,8个数据位.1个停止位,无奇偶效验,无流量控制(握手协议Xon/Xoff).接上串口线,按照屏幕提示输入数据就可以直观地控制3台舵机的旋转角度。
以下介绍一款24路机器人专用控制器。其主要是供不熟悉单片机的读者来使用。该系统整体硬件基本和上述最小单片机控制系统一样,还增加了一片采用I2C 总线 EEPROM存储器,用来记录24路庞大的动作表,主控单片机也是AVRmega 8515.整个动作编程通过PC机串口终端仿真器来实现的。可同时控制24台舵机,并且能分别对台舵机进行速度控制,其中可以插入循环、延时指令。该控制器能让制作者从繁琐的单片机编程中解放出来,并且能让有PC机编程能力的读者进行二次开发。
机器人要实现的动作和功能较多,需要多个传感器对外界进行检测,并实时控制机器人的位置、动作和运行状态。系统中的所有任务最终都挂在实时操作系统C/0S一Ⅱ上运行,因此不仅要考虑微控制器的内部资源,还要看其可移植性和可扩展性。LPC2129是Philips公司生产的一款32位 arm7TDMIS微处理器,嵌入256 KB高速Flash存储器,它采用3级流水线技术,同时进行取指、译码和执行,而且能够并行处理指令,提高CPU的运行速度。由于它的尺寸非常小,功耗极低,抗干扰能力强,适用于各种工业控制。2个32位定时计数器、6路PWM输出和47个通用I/0口,所以特别适用于对环境要求较低的工业控制和小型智能机器人系统。因此选用 LPC2129为主控制器,可以获得设计结构简单、性能稳定的智能机器人控制系统。
系统采用迅通公司生产的PTR2000无线通信数据收发模块。电路接口如图2所示。该模块基于NORDIC公司生产的射频器件nRF401开发,其特点是:①有两个频道可供选择,工作速率高达20 Kb/s;②接收发射合一,适合双工和单工通信,因而通信方式比较灵活;③体积小,所需外围元件少,接口电路简单,因此很适合机器人小型化要求;④可直接接单片机串口模块,控制简单;⑤抗干扰能力强;⑥功耗小,通信稳定。
两路超声波传感器用以控制机器人避开障碍物,并预测机器人相对目的地距离,起导航作用,其接收部分与微控制器的捕获和定时管脚相连接。整个超声波检测系统由超声波发射、超声波接收和单片机控制等部分所组成。发射部分由高频振荡器、功率放大器及超声波换能器组成。经功率放大器放大后,通过超声波换能器发射超声波。
图5给出由数字集成电路构成的超声波振荡电路,振荡器产生的高频电压信号通过电容C2隔除掉了信号中的直流量并给超声波换能器 MA40S2S。其工作过程:U1A和UlB产生与超声波频率相对应的高频电压信号,该信号通过反向器U1C变为标准方波信号,再经功率放大,C2隔除直流信号后加在超声波换能器MA40S2S进行超声波发射。如果超声波换能器长时间加直流电压,会使其特性明显变差,因此一般对交流电压进行隔除直流处理。 U2A为 74ALS00与非门,control_port(控制端口)引脚为控制口,当control_port为高电平时,超声波换能器发射超声波信号。
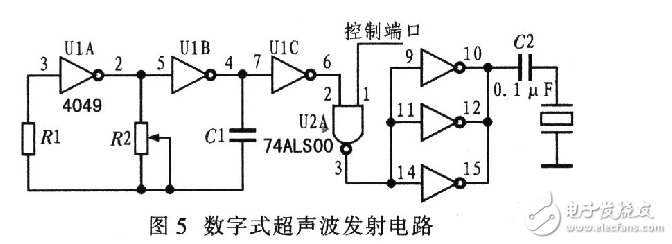
图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电压比较器LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相连,当接收到中断信号后,单片机立即进入中断并对超声波信号做处理和判断。
设计光电检测模块,使机器人能够检测地面上的白色引导线。光电检测电路最重要的包含发射部分和接收部分,其原理如图3所示。发射部分的波形调制采用了频率调制方法。由于发光二极管的响应速度快,其工作频率可达几兆赫兹或十几兆赫兹,而检测系统的调制频率在几十至几百千赫兹范围之内,因此能够满足要求。光源驱动主要负责将调制波形放大到足够的功率去驱动光源发光。光源采用红外发光二极管,工作频率较高,适合波形为方波的调制光发射。
接收部分采用光敏二极管接收调制光线,将光信号转变为电信号。这种电信号通常较微弱,需进行滤波和放大后才能做处理。调制信号的放大采用交流放大形式,可以将调制光信号与背景光信号分离开来,为信号处理提供方便。调制信号处理部分对放大后的信号进行识别,判断被检测对象的特性。因此,该模块的本质是将“交流” 的、有用的调制光信号从“直流”的、无用的背景光信号中分离出来,进而达到抗干扰的目的。
更多机器人技术资料,电路图及DIY设计,可参见本期Designs of week当中国制造遇上机器人技术,设计思维请跟上!
